手机版|
手机版|

 关注公众号|
关注公众号|


 下载手机APP
下载手机APP摘要:国内汽车产量近年来呈逐年增长态势,预计今年全国产量可超过 2 920 万辆。被称为阳光产业的停车设备制造行业也随之获得了发展机遇。目前机械式停车设备的品种已从普及型的升降横移类、循环类、简易升降类等型式向空间利用率和自动化程度都较高的垂直升降类和平面移动类等型式发展。特别是采用机械手交换形式的平面移动类停车设备是近年来业内企业争相看好的品种。鉴于此,文中就机械手应用于平面移动类停车设备的发展过程及如何设计展开讨论。
搬运汽车的机械手就其基本动作和控制方式来说, 按 GB/T 12643—1997《机器人与机器人装备 词汇》的定义:“工业机器人是指能自动控制、可重复、多功能、多自由度的操作机,能搬运材料、工件或操持工具来完成各种作业”的装置,无疑应属于工业机器人范畴。就其结构形式来说,按 JB/T 5063—2014《搬运机器人通用技术条件》的定义,则应属于超重型搬运机器人。是起重机械结合微电子技术、信息处理技术、传感技术等而形成的综合集成技术,具有一定的复杂程度。
1 工业机器人技术应用于停车设备的发展过程
机械手式平面移动类停车设备也和其他机电一体化的产品一样,有个不断改进和提高的过程。最早提出这一设计思想的应首推 20 世纪 80 年代以色列人兹华迪(Cvadi) 先生。他所设计的上悬式机械手,以现在的评价, 可能一眼就发现它具有诸多缺陷。但的确他是工业机器人技术应用于机械停车设备的首开先河者。图 1 是采用上悬式机械手完成汽车交换程序的车库示意。在车位上方留有汽车出入库的通道,上悬式机械手悬挂在库位上方的轨道上。机械手除具有行走驱动的功能外,其机械臂具有自动抓取功能。在出入库操作中,其折叠式机械手行走到出库汽车的上方,第一个动作是将手臂展开; 第二个动作是手臂缓慢向车体靠拢并在接触车体之前停止;第三个动作是手腕伸出并进入汽车前后轮之间的底盘下方,然后将汽车抬升,平移进入升降机通道。在升降机上,上述程序反向操作,机械手复原。汽车由升降机运送到达出入口。

采用上悬式机械手的停车设备的显著缺点:1)空间利用率很低,层高需要 3.6 m 以上;2)机械手的腕部着力点在汽车前后轮间的底盘上,有时会接触到汽车的其他部件,不够安全。这种结构的停车设备虽然在国内未获推广,但在其控制系统中已应用了现代工业机器人的所有认址、对位、测距、识别、自动调整姿态等技术, 属于第一代的应用工业机器人技术的停车设备。
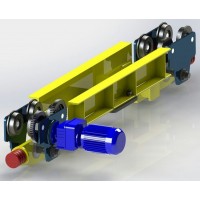
真正能付诸实用的机械手式停车设备出现在 20 世纪 90 年代初的德国。由 Palis 公司库格曼(Kugmann) 先生首次提出机械手进入汽车底盘下方操作,并采用夹持车轮以抬升汽车的方式,解决上悬式机械手的上述两项重大缺陷,其结构如图 2 所示。

这种停车设备的特点:1)扁平狭长的机体,其总高度仅为 140 mm,夹持臂收拢时的总宽度仅为 1 020mm,因此可以从汽车前方或后方进入汽车底盘以下工作。2)采用液压系统推动四对机械臂,以抬升汽车车体。然后以电机驱动的行走装置完成从出入口移送到升降机或从升降机移送到库位的任务。3)采用分体式机体。在法兰克福的原型机中,汽车入库时利用激光测距仪测出汽车的前后轮距,然后对应其轮距移动两部分机体的距离。使四对机械臂的中心都能对准车轮。采用路径引导技术行驶到目标位置,已具备了所有现在平面移动类停车设备机械手的功能。
但是其缺陷也是显而易见的:由于采用液压推动, 其动力源无法压缩到 140 mm 的机体内。因此只能在其后方设置一组高出机体很多的液压动力元件和油箱。也就是说机械手只能在一个方向进入汽车下方;另外一个方向是受到油箱阻挡的。如需将汽车运送到两边的车位上,就要增加一套转盘装置。另外,140 mm 的高度并不能适应所有汽车,有相当一部分轿车底盘离地高度小于 140 mm,使机械手的使用受到限制。
本世纪初,深圳一和公司、深圳中集天达公司、杭州友佳精密机械有限公司等企业的技术人员分别研发了由机械传动夹持式机械臂和带导向槽的停车位,从而很好地解决了车体高度和汽车底盘离地间隙之间的矛盾, 使机械手技术在国内很快获得推广,其结构如图 3 所示。
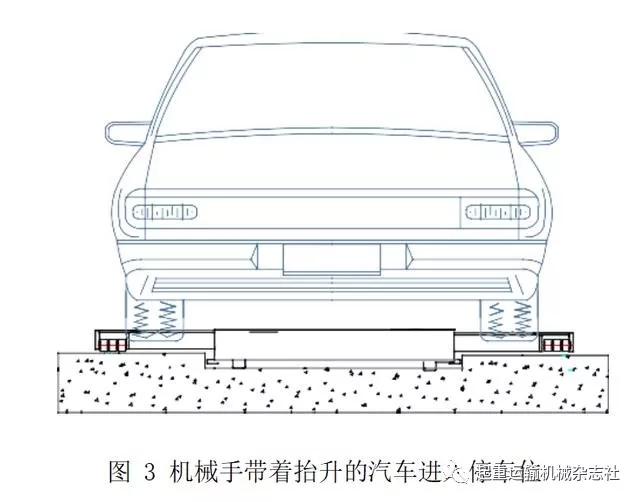
图 3 所示为机械手带着抬升的汽车进入停车位的示意。机械手由于改用了机械传动的抬升装置,其总高度达到 170~180 mm。但由于导向槽的深度为 70 mm 或 70mm 以上,使机械手总高度一部分下沉到导向槽内。其工作范围就基本涵盖了所有轿车的离地高度。
总体结构中除取消了液压动力部件外,仍沿用了Palis 公司的分体式设计。图 4 所示为分体式机构中前后机体以齿条连接的状态:

以上所述几项措施,对 Palis 公司的液压夹持臂式机械手做了实用性的,但却是关键性的改进,使机械手式的平面移动类停车设备得以很快在国内获得推广。相关企业经公告后都已获发明专利授权。
2 机械传动式夹持臂的基本结构
机械臂从液压传动改为机械传动,如上所述是很关键的一步。现在在使用的夹持臂大多采用了如图 5 所示的齿轮式结构。

机械手的臂部是直接握持工件的部件。但对于搬运汽车的机械手,它的工作对象是汽车的轮胎。而且它的工作方式也并非通用式机械手的“夹钳”的形式。而是所谓“夹抬”的形式。即通过“夹”的动作而达到“抬起”的目的。这是极为特殊的一种机械手,必须按照特定工件(汽车轮胎)的形状要求而确定其运动方式、适当的驱动力、一定的开闭范围和对不同尺寸轮胎的通用性等。
通常的机械手执行部件的运动方式分为平移型和回转型两种。平移型的手臂张开闭合靠手臂的平行移动, 在夹持不同尺寸的工件时不会引起中心位置的偏移,但其动作要先伸出夹持臂再进行平移,结构相对比较复杂。回转型手臂的张开闭合依靠手臂根部的回转运动完成。所述机械手采用双支点回转型,即两个方向同时向中心回转而夹起工件的形式。这种结构的手臂机构较简单,外形紧凑。只是夹持不同工件时会产生位置偏差。在搬运汽车的机械手中,可采取辊道式手臂及左右轮胎对称式动作以消除其影响。
辊道的布置则模拟汽车轮胎的外周形状,在两组辊道形成双支点回转,并同时作闭合动作时汽车轮胎即被托起抬升,如图 6 所示。而夹持臂的水平方向驱动力计算,由于采用了辊道而可简化为普通的楔形面的计算问题。
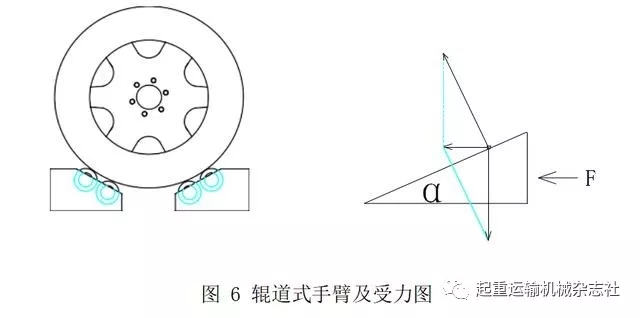
设轿车质量为2 000 kg,其单个轮胎所承受重力(按前后 4:6)G =6 000 N,确定其综合安全系数K =1.2。将已知条件代入得F =KG tg24°=3 355.2 N。即水平方向推力近似为 3 400 N。
多数机械手的臂长设计约为 550 mm,这样便可进一步计算所需的电机输出力矩。
如要求机械臂的全程运动时间(即 0.25 转)为 6 s, 则机械臂的回转速度n =0.25/0.1=2.5 r/min,机械臂在离回转中心 300 mm 处的推力近似为 3400 N ,即要求机械臂回转中心的输出扭矩N =3 400×0.3=1 020 N·m
由于减速电机和齿轮之间的传动系统中可设置 1:3的附加减速比,故选用的减速电机输出转速为2.5×3=7.5r/min、输出扭矩为 1 020÷3=340 N · m 的成品减速电机。查表后,可选用伺服电机或住友等品牌的 0.4 kW小型普通减速电机。
3 行走驱动机构的构成
Palis 公司设计的机械手采用了分体式结构。它的作用是,便于根据在出入口所测出的汽车前后轮距而调整机械手 A/B 两个组件之间的距离,为机械臂后续的夹持抬升程序作准备。调整的方法是 A/B 组件中其中一组制动,另一组的行走驱动动作,A/B 两组机械手带有各自的行走驱动。行走驱动装置如图 7 所示。

如图 7,电机通过传动轴传动两边的车轮,并布置从动车轮,其形式为前后布置。为了完成机械手对目标位置的识别、判断和自动调整姿态等程序,机体内布置有相当数量的传感、扫描、测距等部件,这些部件容易受振后产生移位甚至损坏,并且在机械手从出入口到升降机,从升降机到平移台车,再从平移台车到库位,其中需跨越几道约 10~30 mm 宽的间隙。车轮前后双轮布置的形式可大大降低振动量,降低故障率。
行走驱动装置的左右前方各布置了侧向导轮。其作用是使机械手能始终在库位上或台车上、出入口上的导向槽内移动。
4 机械手的控制系统
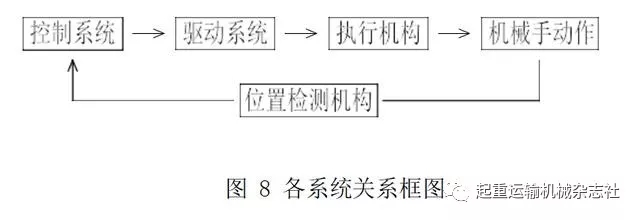
停车设备机械手本质上应是一种轮式移动机器人, 通常由三个系统组成。除驱动系统、执行机构的硬件布置如上所述外,其感知和控制系统占有很大比例。现在较多采用的系统为:“PLC+ 运动控制器 + 伺服电机” 的形式,一般地采用通用软件。各系统之间的相互关系如图 8 所示。
控制系统支配着机械手按程序运行,并记忆人们给予机械手的指令信息。机械手平面移动类停车设备的工作流程如图 9 所示。

通过对上述工作流程的分析可知,与通用的工业机械手不同点是两项外部信息的获取对于机械手的正常工作是非常关键的:
1) 入库汽车前后轮的轮距中心尺寸的检测;
2) 入库汽车前后轮所处位置的检测。
入库汽车轮距中心尺寸的检测关系到机械手正确调整姿态,从而使四对机械臂能精确对准汽车前后轮中心。如产生偏差,则机械臂作闭合动作时,将引起汽车在机械臂上扭动而产生偏斜,严重时夹持抬升动作失败。要求达到的检测精度和动作精度为 ±3 mm。检测方法较多采用光栅式测距,其原理是通过检测红外光源被车轮遮挡的部分而测出轴距。德国 SICK 公司有适应此量程和精度的产品。当然也可以使用能满足其精度要求的光电或红外等测距方法。
前后轮位置的检测则关系到机械手驱动的目标位置的确定。如果机械手是从汽车的前方进入底盘下方,那么汽车的后轮中心便是机械手驱动的目标位置。机械手A 组分体的机械臂中心应与目标位置重合。也有些厂家, 不管机械手从汽车的前方或者后方进入底盘下方,始终以汽车前轮为目标位置。
另外值得注意的是:机械手的驱动行程往往是定值。例如从出入口到升降机,从升降机到横移台车,再从横移台车到库位,其行走路径由各处的导向槽限制;而其行走路程则都在 6 m 左右。这对于控制系统的电源设计、传感器布置、实时数据采集等将产生一定影响。
由于感知和控制系统集中了控制技术、人机界面技术、图形技术、数据库技术和通讯技术、因此信息的融合显得十分重要。其中包含动态显示、测量系统、实时数据的通讯和交换和功率运动控制系统。
5结论
如上所述,停车设备机械手是一种专用工业机器人。它的功能除了根据指令要求将入库汽车从一个站点输送到另一个站点外,同时具有对目标位置的识别、判断和自动调整姿态等能力。由于采用了地面设置导向槽等措施,使机械手简化了通用型移动工业机器人必须具备的路径规划和导引系统,也提高了工作的可靠性。
上述机械手在实际应用中与横移台车、升降机配套组合而成的平面移动类停车设备的主要优势在于:1) 较低的层高:约为 2 m,比梳齿式设备低 0.1 m/ 层。2) 简洁的库位布置,库位上除导向槽外无其他设施。其总成本比梳齿低 10% 左右,比板式低 25% 左右。因此在自动化程度较高的平面移动类停车设备中具有很强的竞争力。